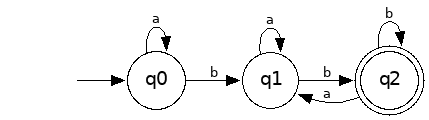
Q = {q0,q1,q2}
Σ = {a,b}
S = q0
F = {q2}
| δ |
a |
b |
| q0 |
q0 |
q1 |
| q1 |
q1 |
q2 |
| q2 |
q1 |
q2 |
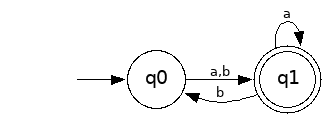
Q = {q0,q1}
Σ = {a,b}
S = q0
F = {q1}
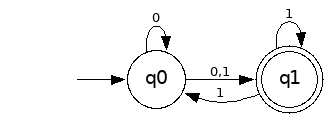
Q = {q0,q1}
Σ = {0,1}
S = q0
F = {q1}
| δ |
0 |
1 |
| q0 |
{q0,q1} |
{q1} |
| q1 |
Ø |
{q0,q1} |
Q = {q0,q1}
Σ = {0,1}
S = q0
F = {q1}
| δ |
0 |
1 |
| q0 |
{q0,q1} |
{q1} |
| q1 |
Ø |
{q0,q1} |